流形视角下的牛顿力学(杀鸡用牛刀)
 评论
评论
本文真是杀鸡用牛刀,但好处是彻底厘清了如何用对称性构造拉格朗日量的一般套路。
本文通过强算Killing方程的笨方法,来确定伽利略时空,特别是欧氏空间的完整对称性,进而得到无穷小生成元(变换),最后用这组无穷小变换在拉格朗日量上的不变性来确定拉格朗日量。
伽利略时空
伽利略时空流形
\(M\)
的时间和空间是绝对分离的:
\(M=\mathbb{R}^3\times \mathbb{R}\)
。
伽利略时空李群(10维):
\(G=\mathrm{SO}(3)\times T(3)\times T(4)\)
- 空间平移群 \(T(3)\) : \(x^\mu\to x^\mu+b^\mu\)
- 空间旋转群 \(\mathrm{SO}(3)\) : \(x^\mu \to A^\mu_{\ \ \upsilon} x^\upsilon,\quad A^TA=I\)
- 时间平移群 \(\mathbb{R}\) : \(t\to t+c\)
- 伽利略惯性平移群 \(\mathbb{R}^3\) : \(x^\mu \to x^\mu +v^\mu t\)
\(M\) 的空间部分(欧氏空间) \(\mathbb{R}^3\) 的度规(线元表示)
\[ ds^2=(dx)^2+(dy)^2+(dz)^2 \]伽利略时空
\(M\)
在李群
\(G\)
的作用下是欧氏等度规李变换,即欧氏线元是不变量。
欧氏空间的Killing矢量场
由于伽利略时空的时间和空间是绝对分离的,同时与时间相关的对称性都是平移,所以,有必要先单独分析三维欧氏空间的对称性。
可通过求解Killing方程确定欧氏空间的平移群
\(T(3)\)
和转动群
\(\mathrm{SO}(3)\)
。合起来对应Killing矢量的6个基底所张成的空间。 下面给出Julia代码:
using SymPy
# 选择欧氏坐标系
@vars x y z real=true
X = [x,y,z]
# 待求的Killing矢量场的分量
ξ = SymFunction("ξ^1,ξ^2,ξ^3")
# 欧氏度规及逆度规
g = sympy.eye(3) .* [1,1,1]
gi = inv(g)
# 根据度规计算克氏符
Γ = sum([(1//2)*gi[σ,ρ]*(diff(g[μ,ρ],X[υ])+
diff(g[υ,ρ],X[μ])-diff(g[μ,υ],X[ρ]))
for μ in 1:3,υ in 1:3 ,σ in 1:3]
for ρ in 1:3)
# 列出所有独立Killing方程组
eqs = [(0⩵diff(sum(g[υ,ρ]*ξ[ρ](x,y,z) for ρ in 1:3),X[μ])+
diff(sum(g[μ,ρ]*ξ[ρ](x,y,z) for ρ in 1:3),X[υ])-
2*sum(Γ[μ,υ,σ]*sum(g[σ,ρ]*ξ[ρ](x,y,z) for ρ in 1:3)
for σ in 1:3))
for μ in 1:3,υ in 1:3 if μ ≤ υ ]
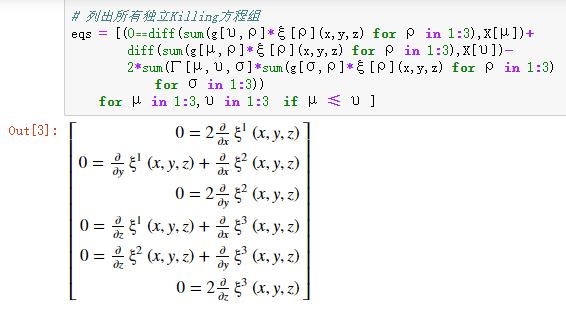
根据方程1、3、6,可设:
\[ \begin{aligned}\xi(x,y,z)&=\Big(\xi^1(x,y,z),\xi^2(x,y,z),\xi^3(x,y,z)\Big)^T\\&=\Big(f(y,z),g(x,z),h(x,y)\Big)^T\end{aligned} \]带入方程2、4、5,并分离变量得:
\[ \frac{\partial f(y,z)}{\partial y}=-\frac{\partial g(x,z)}{\partial x}=C_1(z)\\ \frac{\partial f(y,z)}{\partial z}=-\frac{\partial h(x,y)}{\partial x}=C_2(y)\\ \frac{\partial g(x,z)}{\partial z}=-\frac{\partial h(x,y)}{\partial y}=C_3(x) \]当 \(C_1(z)=C_2(y)=C_3(x)=0\) 时,有三个平移特解:
\[ \boxed{\begin{aligned}(\xi_4)^a=\left(\frac{\partial}{\partial x}\right)^a \overset{\Delta}{=}(e_1)^a\quad \xi_4=(1,0,0)^T\\ (\xi_5)^a=\left(\frac{\partial}{\partial y}\right)^a\overset{\Delta}{=}(e_2)^a \quad \xi_5=(0,1,0)^T\\ (\xi_6)^a=\left(\frac{\partial}{\partial z}\right)^a\overset{\Delta}{=}(e_3)^a\quad \xi_6=(0,0,1)^T\end{aligned}} \]当 \(C_1(z)=C_2(y)=0,C_3(x)\ne0\) 时,有一个沿 \(x\) 轴平移特解(前面已有),一个绕 \(x\) 轴转动特解(新解):
\[ \boxed{(\xi_1)^a=z\left(\frac{\partial}{\partial y}\right)^a-y\left(\frac{\partial}{\partial z}\right)^a\quad \xi_1=(0,z,-y)^T} \]当 \(C_1(z)=0,C_2(y)\ne 0,C_3(x)=0\) 时,有一个沿 \(y\) 轴平移特解(前面已有),一个绕 \(y\) 轴转动特解(新解):
\[ \boxed{(\xi_2)^a=-z\left(\frac{\partial}{\partial x}\right)^a+x\left(\frac{\partial}{\partial z}\right)^a\quad \xi_2=(-z,0,x)^T} \]当 \(C_1(z)=0,C_2(y)\ne 0,C_3(x)\ne 0\) 时,一个绕 \(y\) 轴转动特解(前面已有),一个绕 \(x\) 轴转动特解(前面已有)。
当 \(C_1(z)\ne 0,C_2(y)= 0,C_3(x)=0\) 时,一个沿 \(z\) 轴平移特解(前面已有),一个绕 \(z\) 轴转动特解(新解):
\[ \boxed{(\xi_3)^a=y\left(\frac{\partial}{\partial x}\right)^a-x\left(\frac{\partial}{\partial y}\right)^a\quad \xi_3=(y,-x,0)^T} \]\(C_1(z),C_2(y),C_3(x)\) 还剩下三种组合,但相关得特解都和前面重复了。
所以,三维欧氏空间的6维Killing矢量场,由三个平移 \(\{(e_1)^a,(e_2)^a,(e_3)^a\}\) 和三个转动 \(\{(\xi_1)^a,(\xi_2)^a,(\xi_3)^a\}\) ,一共6个特解张成。
这三个转动基底(特解) \(\{(\xi_1)^a,(\xi_2)^a,(\xi_3)^a\}\) ,构成一个反对称矩阵,这就是 \(\mathrm{SO}(3)\) 的三个生成元,每列代表一个生成元(也是李代数 \(\mathscr{S\!O}(3)\) 上的三个基底):
\[ \{\xi^\mu_{\ \ \upsilon}\}=\begin{bmatrix}0 & -z & y \\ z & 0 & -x \\ -y & x & 0 \end{bmatrix} \]于是,空间旋转群可改写成参数形式(利用了李代数到李群的指数映射):
\[ \boxed{x^\mu\to \exp\left[\varepsilon \xi^\mu_{\ \ \upsilon}\right] x^\upsilon=x^\mu+\varepsilon \xi^\mu_{\ \ \upsilon} x^\upsilon=x^\mu+\xi^\mu_{\ \ \upsilon} \varepsilon^\upsilon} \]其中, \(\varepsilon\) 是无穷小参数, \(\varepsilon^\upsilon=\varepsilon x^\mu\) 则是 \(\varepsilon\) 诱导的三个无穷小量,对应 \(\mathrm{SO}(3)\) 的三个参数。
由伽利略时空对称性确定自由粒子的拉格朗日量
首先,在空间、时间的无穷小平移变换下,必须保持拉格朗量不变,这意味着拉格朗日量不显含位置和时间,即:
然后,在无穷小空间转动变换下,也必须保持拉格朗量不变(优先保证相等,其次也可精确到相差一个全微分),即:
最后,在无穷小伽利略惯性平移变换下(变换的相对速度
\(\vec{\varepsilon}\to 0\)
),也必须保持拉格朗量不变(优先保证相等,其次也可精确到相差一个全微分),即:
我们注意到最后一个等式左边无法取0(因为 \(L\) 取常数无意义),那么只能保证是时间的全导数。进而只能取 \(\dfrac{\partial L}{\partial v^2}\) 为常数,即:
\[ L=\frac{m}{2}v^2 \]其中, \(m\) 成为质点的质量。
质点系的拉格朗日量
根据,各自完全独立系统的总拉格朗量等于部分拉格朗量之和,然后再补上表示各质点间相互作用的某个函数 \(-U\) ,则有封闭质点系拉格朗日量的一般形式:
\[ \boxed{L=\sum_\alpha{\frac{1}{2}m_\alpha v_\alpha^2}-U(\vec{r}_1,\vec{r}_2,\dots)} \]其中,
\(T=\sum_\alpha{\frac{1}{2}m_\alpha v_\alpha^2}\)
称为系统动能,
\(U\)
则成为系统势能。